近年の技術発展により、自動運転を行う自動車、自走するロボットやドローンなどの開発が進んでいます。これらの自動運転や自走を支える最新技術が「SLAM(スラム)」です。
今回の記事では、自動運転に活用されているSLAMの技術や導入メリット、導入事例について解説します。
自動運転の実現のためにSLAM導入や環境構築を検討の際には、VRコンテンツの作成や、シミュレーション環境の構築にも多くの実績があるテクノプロ・デザイン社へご相談ください。それぞれの目的に合ったSLAM環境構築ソリューションをご提案いたします。

SLAMとは

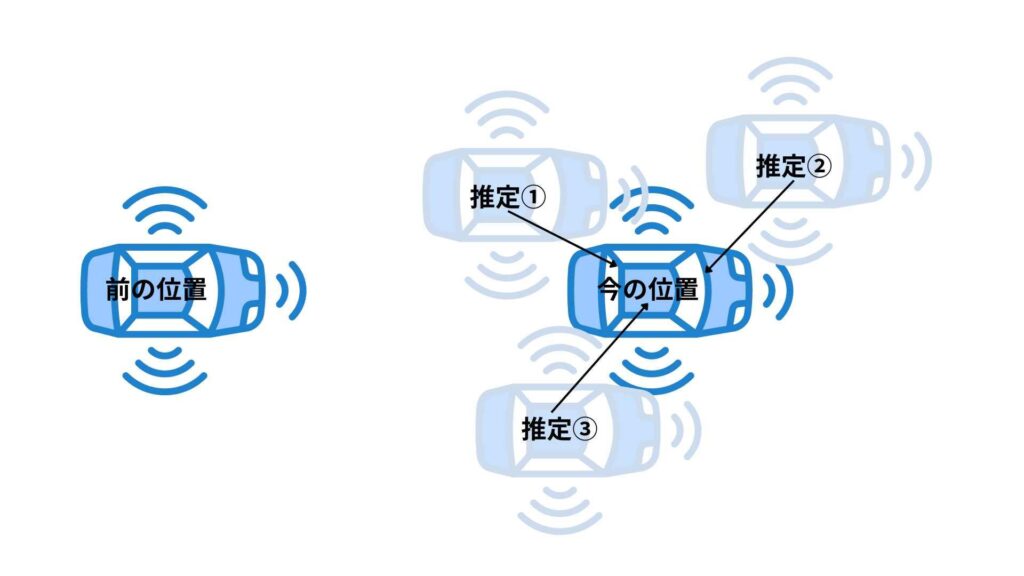
SLAMとは、英語の「Simultaneous Localization And Mapping」の略で、「自己位置推測と地図作成」を意味します。自動車、ロボット、ドローンなどの移動体が自ら移動し、自分の位置を推測する自己位置推測と、未踏の場所を探索し地図として作成する環境地図作成を同時に行う技術を合わせて、SLAMと呼んでいます。
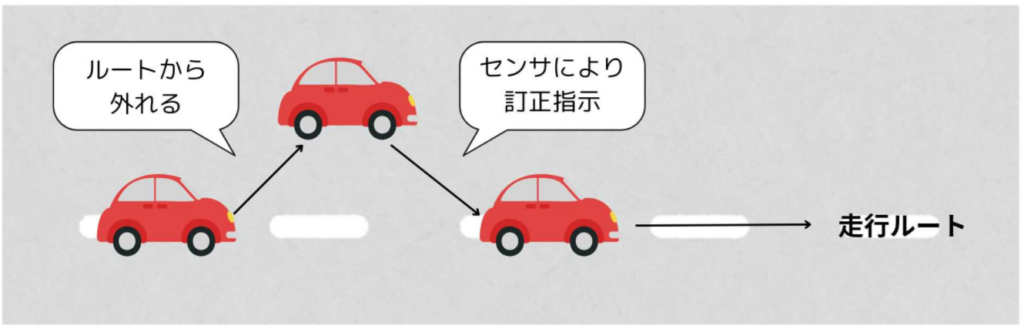
GPSは絶対位置を得ることができますが、SLAM技術ではGPSが使えない場所でも、置かれた環境から相対的に自己位置を推定することができます。SLAM技術の自己位置推定と環境地図作成によって、移動体が自らの自分の位置と周辺状況を把握し、外部からの誘導なしで障害物などを回避し、目的地までの自走できるようになります。
SLAMはおもに自動車の自動運転や自走ロボット・ドローンのほか、VRなどに活用されています。
SLAMのドローンへの活用については以下の記事でくわしく解説しています。

また、SLAMの自己位置推定と環境地図の作成については以下の動画も参考にしてください。
自動運転に導入されているSLAMの技術
従来の自動車やドローンの自動運転、自走ロボットの技術としておもに活用されていた技術がGPSです。SLAMでは、カメラやレーザーなどのセンサーを使って、移動体自身と目的物(ランドマーク)までの距離と方向を計測し、自己位置推測や環境地図作成を行います。
自己位置推測で活用するセンサーの種類や方法によって、SLAMには以下のようなさまざまな技術があります。種類によってメリットやデメリットがあり、実用化の際には複数の技術を組み合わせることで正確な自己位置推定を目指すこともあります。
Depth SLAM
ToFセンサーやデプスカメラから取得した深度画像(距離情報)から自己位置を推定します。立体に強く、特徴の少ない環境や暗所でもSLAMを実行可能であることがメリットです。
Visual SLAM
複眼カメラ(ステレオカメラ)、深度カメラ、単眼カメラから取得した映像から、複数の物体(特徴点)までの距離を推定し、相対的な位置(移動量)から自己位置を推定します。
センサーに活用するツールが比較的安価です。また、カメラにより歩行者や白線も検出でき、柔軟な自立・自走運転が構築できるなどのメリットがあります。一方で、夜間やカメラのレンズが濡れたり汚れたりすることで精度が落ちてしまいます。
LiDAR SLAM
「Lidar(Light Detection and Ranging)」というレーザーセンサーから取得したデータを活用し精度の高い地図を作成し、あらかじめ準備してあった地図と照合することで自己位置を推定します。
Lidarは距離や形状を非常に高精度に計測可能なセンサーです。そのため他のSLAMと比較して精密な動きが期待できますが、一方で、高価でデータ処理の負荷も少なくありません。
また、特徴となる物体が少ない場所では十分な精度を発揮しづらかったり、事前作成した地図で目印になった荷物などが移動してしまうと自己位置推定がうまくいかないことなどがあります。
以下の動画も参考にして下さい。
Landmark based SLAM
Landmark based SLAMでは、QRコードなどのランドマークを基準に自己位置推定と環境地図の作成を行います。
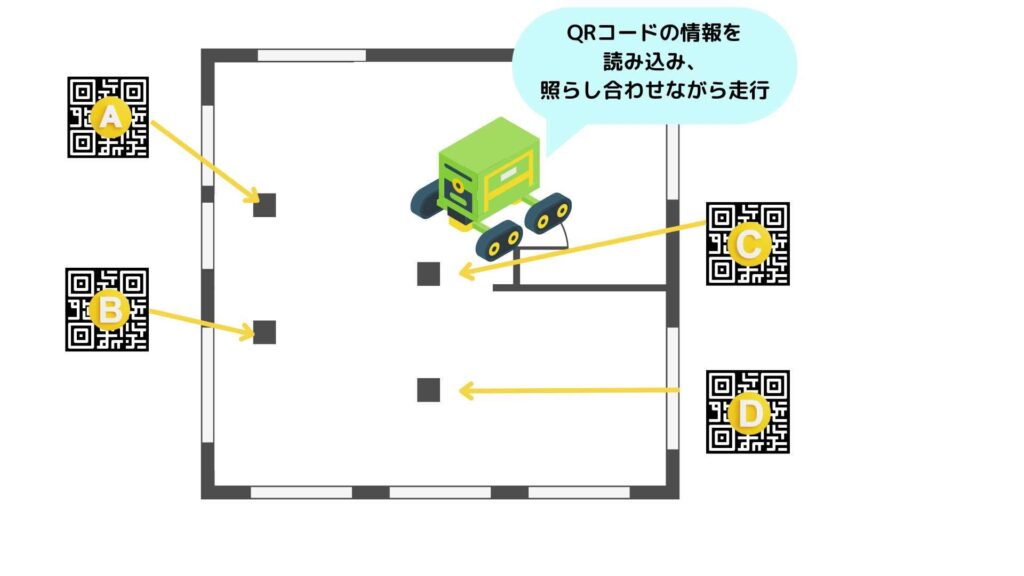
利用する場所にいくつかのQRコードを準備し、移動体はQRコードの設置場所に対応した地図と走行中に検出したQRコードとを照合しながら自己位置を推定します。
倉庫内などの狭所でも自動運転が可能です。
Visual Relocalizer
事前に撮影しておいた風景を地図として利用する方法です。
移動体は移動しながら撮影を行い、事前に撮影したものと比較することで自己位置を推定します。
比較的低コストで導入可能です。
自動運転にSLAMを導入するメリット

SLAMを自動運転の技術として活用することで得られるメリットを解説します。
屋内環境でも実行可能
SLAMはGPSの電波が届かない屋内や地下などの環境でも自動運転が実現できます。未知の環境でもSLAMによって自己位置の推測と地図作成を同時に行うことで、従来の技術では難しかった環境でも自動運転が可能です。
安全かつ効率的なルートを選択できる
SLAMは周囲から得た情報をもとに、リアルタイムで位置を特定し、環境地図を作成していきます。静的な障害物はもちろん、動的な障害物も検出できるため、障害物を回避しながら安全かつ効率的なルートを選択しての自動運転が可能となります。
複雑な形状の環境下でも実行可能
SLAMでは、周囲の環境を2次元平面ではなく3次元空間として把握できるため、従来の技術よりも精密に自身の状況を認識できます。道順が複雑な都市環境や工場のライン上などでも、自動運転が可能です。
用途に応じてさまざまな手法を選択できる
SLAMは前述通り、センサーとして活用するものや、自己位置推測の取得方法によってさまざまな種類があります。コストや用途、自動運転環境など、重視したいポイントに合わせ、最適な組み合わせを選択し、実行できます。
SLAM導入時の課題・注意点

SLAMは安全かつ精度の高い自動運転を実現できる技術であるものの、導入のハードルが高いというデメリットがあります。SLAM導入時の課題や注意点について解説します。
高スペックのハードウェアや専門的な知識・スキルが必要
SLAMの自己位置推定や環境地図作成の実行には、環境データをリアルタイムで大量処理する必要があります。そのために、リアルタイムの負荷の高い処理に耐えられる高性能なハードウェアが必要です。
また、異なるセンサーのデータの同期やノイズ除去、専用アプリケーションのプログラミングといった高度な知識と専門的なスキルがSLAMシステムの設計と実装には必要になります。
高額な導入コスト
高スペックのハードウェアの導入やランニングコストをはじめとした多額の費用が発生します。自動運転で実現する目的などを踏まえて、費用対効果を考えることが重要です。
自己位置推定の精度が低下することがある
SLAMでは、センサーデータの誤差や特定の環境下において位置推定の精度が低下する場合があります。精度の低下を防ぐためには、以下のような対応が必要です。
| ・照明の条件が悪いケースや特徴が少ないときには、赤外線センサーや超音波センサーを使用する ・追加で照明を用意する ・種類の異なる複数のセンサーで取得したデータを統合する など |
自動運転におけるSLAM技術の導入や精度を維持するための対応には専門的な知識やスキルが欠かせません。SLAM技術についてのご相談は、全国30以上の拠点と7000人以上の経験豊富なエンジニアを有するテクノプロ・デザイン社にお任せください。

SLAMの自動運転の導入事例
ここではSLAMの自動運転への導入事例を解説します。
SLAM技術搭載の自動搬送ロボット「モバイルロボットLD/HDシリーズ」

オムロンの「モバイルロボットLD/HDシリーズ」は、経済産業省と一般社団法人「日本機械工業連合会」が実施する「第10回ロボット大賞」の受賞ロボットです。搬送・配達・周回といった単純作業が可能な自動搬送ロボットとなっています。
SLAMや障害物回避技術を搭載することで、人や障害物を回避しながら走行できる自動運転機能を実現。運行管理ソフトウェアにより最大100台までの一括管理を可能としています。
工場レイアウトのCADデータ作成などは不要で、走行しながら周囲環境をスキャンし、走行用マップを自動生成。ユーザーは簡単に搬送を指示でき、使いやすい仕様であるところも評価されました。
SLAM技術を活用した「ランプバス自動走行実証実験」

全日本空輸(ANA)やAIROによる令和元年度のランプバス自動走行実証実験には、SLAMが活用されています。
ANAはランプバスにSLAM技術を導入し、羽田空港でランプバス自動走行の実証実験を実施しました。2020年1月22日から1月31日までの平日8日間で、走行回数は合計で57回、乗車人数は合計138人でした。夜間や多少の雨でも晴天日と同等レベルでの走行が可能だったことに加えて、試乗者アンケートでは発進や停車、加速時などがスムーズで快適、という意見も上がっています。
また、AIROはZMP社の「RoboCar Mini EV Bus」車両を使用した中部国際空港でランプバスの3日間の実証実験を実施しました。走行ルートは到着便を想定した駐車ポイントからオープンスポットを中継する往復約3キロのコースにて、自動運転レベル4(高度運転自動化)での運用を想定。リモートコントロールセンターからオペレータが指示するフリートマネジメントシステムの機能や、障害物の自動回避システムの検証が行われました。
「宇宙無人建設革新技術開発」へのSLAM技術の活用
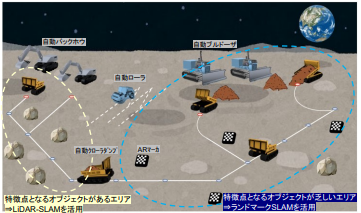
国土交通省などが推進する「宇宙開発利用加速化戦略プログラム(スターダストプログラム)」の一環として、月面環境に適応するSLAM自動運転技術の開発が進んでいます。
環境情報を活用するLiDAR-SLAM技術と、人工的な特徴点を活用するランドマークSLAM技術を統合することで、月面でも自動運転技術を確立することを目指している事業です。
同事業では月面拠点建設へ適応するための宇宙無人建設革新技術開発を開発し、激甚化する災害対応や国土強靭化、人口減少によって起きる人手不足に対応できるほか、地上での事業の波及も期待されています。
まとめ
SLAMの自動運転に活用されている技術や導入するメリットと課題、企業や団体のSLAMの自動運転への導入事例等を解説しました。SLAMは精度や安全性の高い自動運転技術には欠かせない技術です。自動車はもちろん、工場や倉庫の自動運転ロボットなど、業務効率化を目的とした自動運転も実現できます。
一方で、導入には専門的な知識とスキルが欠かせません。自動運転を目的としたSLAMの導入や構築をご検討の際は、テクノプロ・デザイン社へご相談ください。
精度の高い自動運転を実現できるSLAM環境の構築を、経験豊富なエンジニアが支援します。