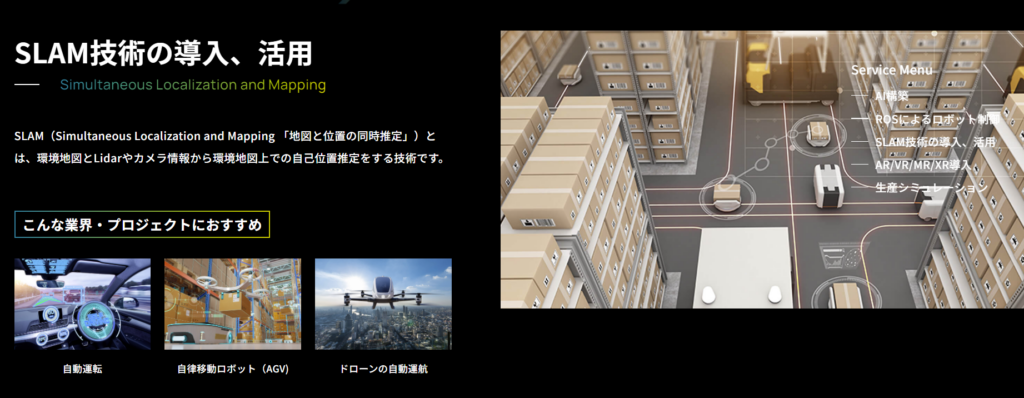
自動運転からVRまで、さまざまな分野のIT技術に応用されている最新技術が「SLAM」です。近年では、SLAMを利用するドローンのモデルも誕生しました。今回の記事では、SLAMの概要や種類とともに、ドローンへSLAMを活用した事例、さらにドローン以外のSLAMの活用事例についても解説します。
SLAM技術の導入を検討の際は、ぜひテクノプロ・デザイン社にご相談ください。SLAM技術にはさまざまな種類があり、目的に応じた技術を搭載することが求められます。経験豊富なエンジニアが7000人以上在籍するテクノプロ・デザイン社なら、解決したい課題や目的に応じて迅速・的確なソリューションを提供可能です。

SLAMとは

SLAMとは「Simultaneous Localization And Mapping」の略で、日本語では「自己位置推定と地図作成」と訳されます。
ロボットやドローンが自ら移動し、自分の位置を推測しながら未知の領域を探索し、環境の地図を作成する技術を指します。
SLAMの原理や種類について解説します。
SLAMの原理
SLAMは、自分の周辺状況を把握し地図として作成する「環境地図作成」と、ロボットやドローンなどの移動体自身が現在地を推測する「自己位置推定」を同時に行います。
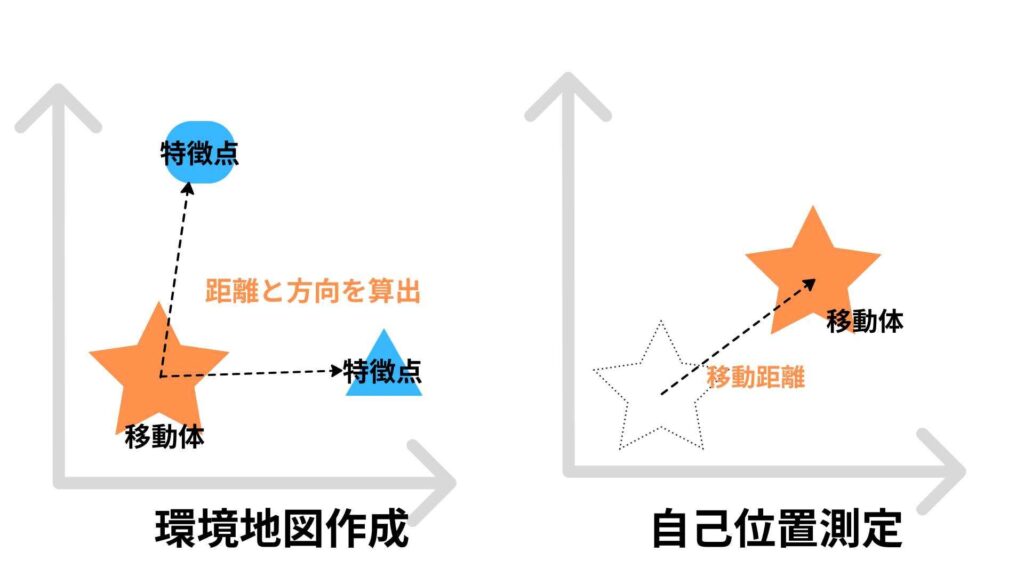
| 環境地図作成 | 移動体(ロボットやドローン)は特徴点(目印)と移動体自身までの距離・方向を各時刻ごとにセンサーで測定します。そして移動体と特徴点の距離から特徴点の位置を割り出します。 |
| 自己位置推定 | 前の時刻から現在までの移動距離を元に自身の位置を推定します。 |
SLAMを活用することで、移動体は自分の位置と周辺状況を把握できるため、障害物などを外部からの誘導無しで回避し、目的地までの自走が可能となります。
たとえば物流現場や製造工場内で活用するピッキングロボットなどの正確な自走には、SLAMの技術が不可欠と言えるでしょう。
SLAM技術を活用したドローンについては以下の動画も参考にしてください。
SLAMの種類
SLAMの代表的な種類は、以下の通りです。
| SLAMの種類 | 特徴 |
| Depth SLAM | ToFセンサーやデプスカメラで取得した深度画像(距離情報)から自己位置を推定 |
| Visual SLAM | 複眼カメラ(ステレオカメラ)、深度カメラ、単眼カメラの映像から特徴点までの距離を推測し、相対的な位置から自己位置を推定 |
| Lidar SLAM | Lidar(Light Detection and Ranging)から取得するデータを活用し、自己位置を推定 |
| Landmark based SLAM | ランドマークとなるマーカーを特徴点とし、自己位置推定と環境地図を作成する |
| Visual Relocalizer | 事前に撮影しておいた風景を利用して、自己位置を推定 |
それぞれの技術の特徴について解説します。
Depth SLAM
Depth SLAMとは、センサーから取得した深度画像(距離情報)から自己位置を推定する技術です。
代表的なセンサーとしてToFセンサーやデプスカメラが利用され、移動体から周辺にある物体の距離を計測します。Visual SLAMが苦手としている特徴の少ない場所・暗所でもSLAMを使えるという特徴があります。
Visual SLAM
Visual SLAMとは、カメラを活用した自己位置推定技術です。複眼カメラ(ステレオカメラ)、深度カメラ、単眼カメラの映像から特徴点までの距離を推定し、相対的な位置(移動量)から自己位置を推定します。
たとえば、複眼カメラ(ステレオカメラ)を利用したVisual SLAMでは、まず視差情報から特徴点までの距離を推測します。移動体が移動すると計測した特徴点までの距離が変化するため、ここで発生した相違点を複数の特徴点と比較し、物体の相対位置を推測することで、自己位置推定をします。
Visual SLAMは、自己位置推定に使用するカメラが比較的安価に入手できるため、SLAM構築のコストを抑えられます。また、歩行者や白線が検出可能で、柔軟な自立・自走運転が構築できるといったメリットがあります。
Visual SLAMを活用したドローン技術については以下の動画も参考にしてください。
LiDAR SLAM
Lidar SLAMは、「Lidar(Light Detection and Ranging)」と呼ばれるレーザーセンサー(距離センサー)より取得するデータを活用した自己位置推定技術です。
あらかじめ作成しておいた地図と、取得したデータを元にした高精度な環境地図を比較・参照することで自己位置推定を行います。
Lidarは、周囲の構造物にレーザーを照射することで、物質の形状や距離などを計測できることが特徴です。カメラや赤外線センサーといった、他のセンサーと比較すると高精度で形状や距離を計測できます。ただしLidarそのものが高価であることや、自己位置推定のための特徴点が少ない周辺環境ではデータの取得が難しい点、処理の負荷が大きいといったデメリットがあります。
Landmark based SLAM
Landmark based SLAMは、特徴点がランドマークと呼ばれるマーカーで、それを基準に自己位置推定と環境地図作成を行う技術です。
代表的なランドマークには、QRコードなどがあります。たとえば倉庫内にQRコードを数か所設置しておき、QRコードの場所の座標と対応した地図を準備します。移動体は、事前作成しておいた地図と移動中に検出した倉庫内の複数のQRコードの情報を照合して、自己位置推定を行います。
Visual Relocalizer
Visual Relocalizerは、事前に撮影しておいた必要な場所の風景を利用して、自己位置推定を行う技術です。
撮影した風景と地図データベースを関連付けて保存し、地図として利用します。カメラで撮影した景色を、移動体が移動しながら地図データベースと比較することで、現在位置の推測を実行します。
SLAM技術については、以下の記事でも詳しく解説しています。

SLAMのドローンへの活用・研究事例
自己位置推定と地図作成によって移動体の自動運転や障害物回避を実現するSLAM技術は、ドローンにも活用され、さらなる進化のための実験・研究も多く行われています。
ここではSLMのドローンへの活用・研究事例を3つ紹介します。
AIとVisual SLAMを活用した自律飛行ドローンの開発
AIとVisual SLAMが搭載された自律飛行ドローンです。Visual SLAMによる自己位置推定技術に加えて、AIを活用することでドローン自身がルートを決定し、安全な自律飛行を可能としました。GPSが届かない場所や狭所での自律飛行も可能で、飛行時に取得した画像データと位置データを利用し、オルソデータや3Dデータの作成もできます。
SLAMを応用した複数ドローンによる協調的屋内空間探索の研究
ドローンは屋外ではGPSなどの衛星測位システムを用いることができますが、屋内では利用できません。それを解決するのがSLAM技術です。この研究では実時間でSLAMを成立させるためのアルゴリズムについて紹介しています。
例えば、いくつかの小部屋がある建物内でドローンを動かしてさまざまなデータを収集し、SLAMを用いて内部環境地図の推定を行う実験を元に修正・改良を重ねていく研究や、複数のドローンが効率的に室内空間の探索をする「協調的探索」をリアルタイムに求めるアルゴリズムを考える研究などが紹介されています。
ドローンは地上移動ロボットと比較して、搭載物のサイズや重量、電力に制限がある一方、空中を飛翔することで地上ロボットでは到達できない範囲に移動することができ、今後の利活用の広がりにはSLAM技術が基盤になると述べられています。
引用:https://www.jstage.jst.go.jp/article/isciesci/64/2/64_63/_pdf
ドローンの自己位置を高精度に推定する実証実験
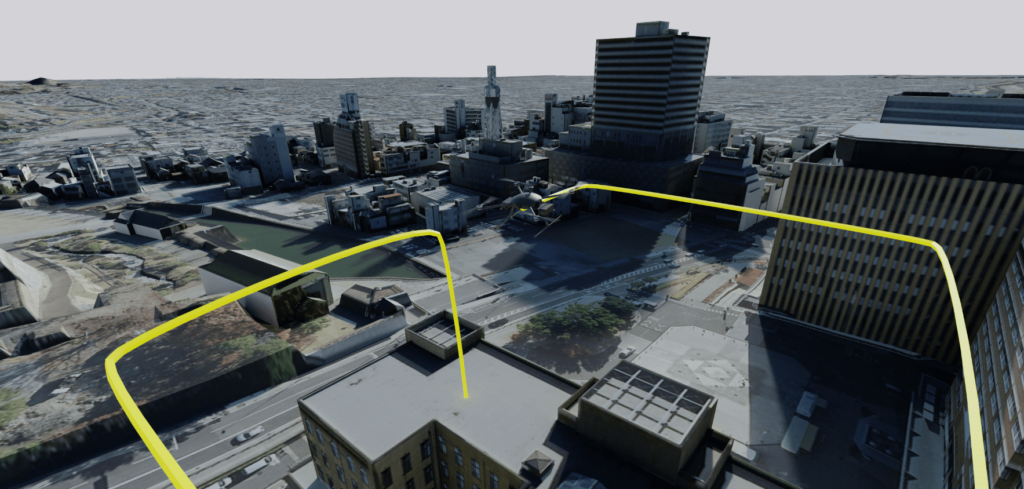
3D都市モデルを活用したSLAM技術によるドローンの高精度な自律飛行を実現するための実証実験の紹介です。
3D都市モデルの形状をマップデータとしたLiDAR SLAMとVisual SLAMによって自己位置推定を行うシステムを開発し、3D都市モデルを3D地図としたドローン航行ナビゲーションシステムと組み合わせることで、都市部における安全な自律飛行・目視外飛行の実現を目指しています。
さらに飛行に必要な演算処理をエッジではなく、サーバー上で中央集権的に行うドローンオペレーションシステムを構築し、エッジ側と比較検証を行いました。将来的には、全国展開される3D都市モデルを活用し、あらゆる場所で効率的にドローンのレベル4飛行を実現し、自律飛行型ドローンの社会実装を促進することを目指しています。
ドローンの自動運行をはじめ、自動運転、移動自律ロボットなどにおけるSLAM技術の導入は、テクノプロ・デザイン社にご相談ください。テクノプロ・デザイン社なら、現実と仮想空間を結ぶデジタルツイン技術、さらに仮想空間上に現実の環境を再構築するメタバースを用いることで製造業の革新を実現できます。
SLAMのドローン以外への活用例
SLAMはドローン以外にも、以下のような分野や事業に活用されています。
| 活用分野 | 特徴 |
| 自動運転技術 | ・SLAM技術活用でもっとも期待値が高い ・リアルタイムで周りの環境や障害物を把握し、車線や先行する自動車の位置を捉えて正確に追従できるようになる |
| 自動ロボット | ・家庭用掃除ロボットや倉庫ロボット ・SLAMを活用して室内地図を作成しながら自己位置を把握することで、効率的な清掃と家具や障害物の回避が可能 |
| 建築、エンジニアリング、メタバース | ・取得したデータをもとに3次元CADやBIMデータ、仮想空間の作成や精密なモデリングが可能 |
| 拡張現実(AR)および仮想現実(VR) | ・デバイスの位置と方向を把握して、仮想オブジェクトを現実世界やHMD(ヘッドマウントディスプレイ)へ表示 |
以下では、SLAM技術のドローン以外への活用事例を紹介します。
SLAMを標準搭載|オムロンのモバイルロボット
オムロンの搬送・配達・周回といった単純作業を担ってくれる自動搬送ロボットLD/HDシリーズは、経済産業大臣賞を受賞しました。
この自動搬送ロボットの実用性を支える技術のひとつがSLAM技術です。マグネットテープオムロンのモバイルロボットシリーズは、接地などの工事を一切必要とせずプログラミングも最小限で済むため、すぐに導入し、最短時間で稼働開始できるという利点があります。
また、幅広い種類の作業・用途に適用でき、拡張性も高いため、自動車、半導体、医療、食品などさまざまな業界の製造現場で導入されています。
引用:https://www.fa.omron.co.jp/products/family/3664/feature.html
レーザーSLAM搭載 ロボット掃除機RULO
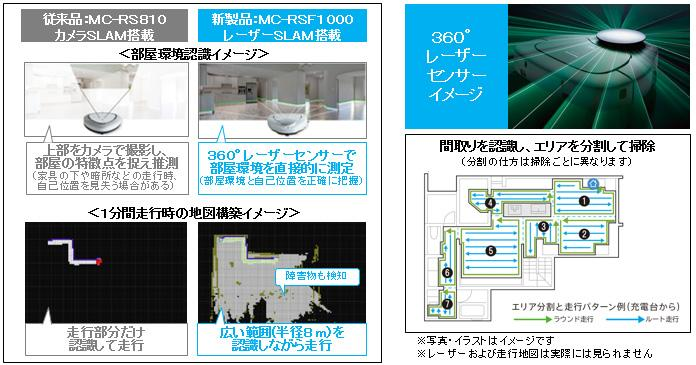
パナソニック株式会社は「レーザーSLAM」を搭載することで360°全方位の間取りと自己位置をすばやく正確に認識できるロボット掃除機RULOを発売しました。
RULOは千葉工業大学未来ロボット技術研究センターと連携し、高性能な自動走行技術と障害物回避技術で、走行のズレやエラーを抑え、部屋中くまなく掃除することで完遂性能を大幅に向上しました。
建築デザイン検討のためのSLAMを用いた屋外型AR システムの開発

本研究では、 visualSLAMを用い開発したシステムを建築物のデ ザイン検討に応用することを想定し、事前に作成した樹木の3次元仮想モデルを画面内に配置し、建築物周辺環境のデザインを検討するためのAR利用を行いました。
まとめ
SLAMの概要や種類に加えて、SLAM技術のドローンへの活用事例、ドローン以外への活用についても紹介しました。SLAMをドローンをはじめとした移動体へ搭載することで、移動体が自らの位置を確認しながら障害物を回避したり、地図を作製したりすることが可能です。
SLAM技術はさまざまな種類があり、目的に応じて搭載することが求められます。SLAM技術の導入を検討の際は、ぜひテクノプロ・デザイン社にご相談ください。全国30箇所以上の拠点から、解決したい課題や目的に応じて迅速・的確なソリューションを提供します。